
教育教学平台及相关设备
1、智能网联汽车线控底盘全硬件在环实时操控-互联系统平台
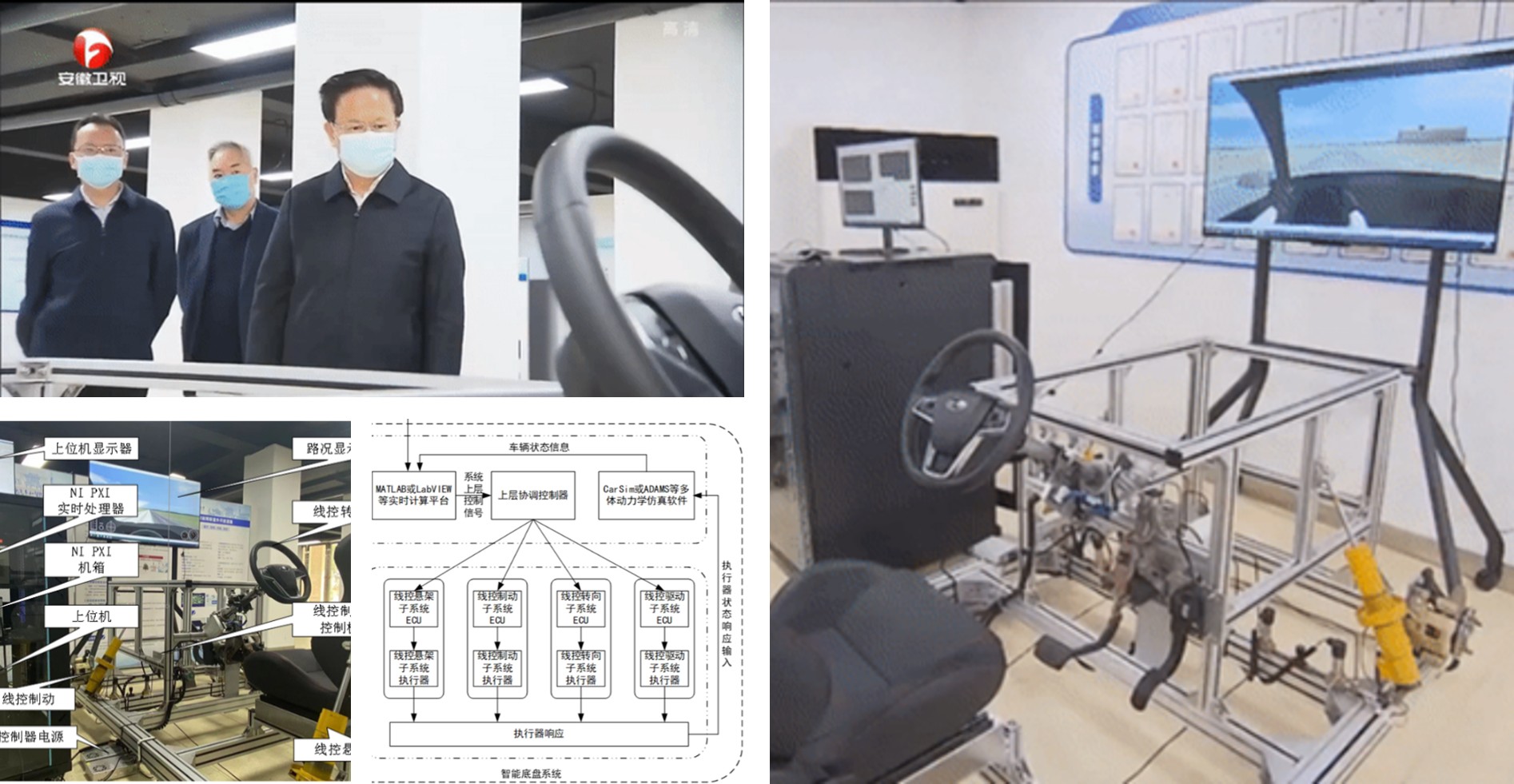
团队自主开发的智能网联汽车线控底盘全硬件在环实时操控-互联系统平台,是一个集成了线控悬架、线控制动与线控转向三大核心子系统的全硬件在环一体化研发平台。平台基于原型化、模块化及架构分层的设计理念,构建了以上位机、NI PXI目标机、I/O板卡及STM32控制板等为核心的硬件环境,并通过NI Veristand与Carsim的深度集成,实现了车辆动力学模型与底层硬件的实时数据交互。平台具备两种核心工作模式:其一,可通过Carsim设定各种行驶工况,对底盘系统进行传感器数据采集与闭环测试;其二,可直接在实体底盘上进行转向或制动操作,并由Carsim实时模拟并呈现车辆动态响应。两种模式均可在人机交互界面上进行信号观测与数据存储,使其能够同时完成单一车辆的实时精确操控与多车互联测试,全面覆盖从控制策略开发、整车电气架构设计到车路协同理论验证的研发需求,为智能网联汽车线控底盘技术提供了高效的研发与验证环境。
2、多模态可控悬架试验平台
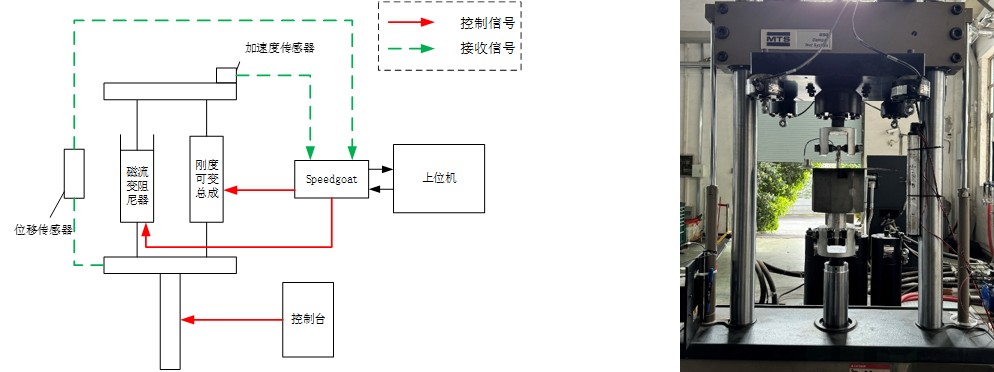
多模态可控悬架试验平台是基于实时仿真技术的先进测试系统,由MTS试验台、智能悬架执行器、传感器网络和Speedgoat实时目标机共同构成。平台通过MTS系统模拟随机路面激励,精准复现多种实际行驶工况;智能悬架执行器(包括电磁作动器与磁流变阻尼器)安装在簧载与非簧载质量之间,通过传感器实时采集系统动态响应,Speedgoat与上位机建立通信,既接收控制指令又下发控制信号至智能悬架执行器,调节其输出的主动力和阻尼力,从而实现对悬架振动的高效控制。该平台支持悬架多种工作模式的实时切换与自适应控制,为多模式可控悬架系统的性能评估和算法验证提供了高精度、全工况的测试环境。
3、Speedgoat半实物仿真平台
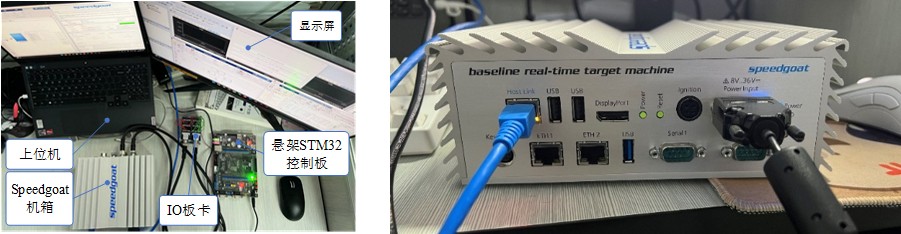
Speedgoat半实物仿真平台基于Simulink进行开发和测试,通过高度集成的软硬件结合方案,将仿真模型直接部署到实时系统中。系统核心包括Speedgoat实时控制硬件及其配套的实时接口软件,通过与Simulink无缝集成,为车辆控制等模型提供底层驱动支持,可直接将应用层控制模型下载至硬件运行。该平台支持快速原型开发与硬件在环(HIL)测试,通过实时硬件设备模拟非真实控制对象,在真实环境中对控制算法和硬件系统进行高精度验证,广泛应用于控制、通信和信号处理等领域,有效缩短开发周期并提升系统可靠性。
4、RT3000 v3高精度GNSS/INS组合导航系统

RT3000 v3 是一款用于ADAS和自动驾驶测试的高性能组合导航系统。它采用GNSS与惯性测量单元(IMU)紧耦合技术,支持GPS和北斗卫星系统,在开阔天空环境下可实现厘米级RTK定位精度,姿态测量精度为0.03°,侧偏角精度0.15°,数据输出速率最高可达250 Hz。设备提供双天线配置,支持车轮速度信号输入,并集成NTRIP客户端,有效保障在复杂环境下的测量可靠性。通过可选的内置RT-Range S Hunter处理器,RT3000 v3能够同时追踪多个移动目标,实时获取其相对位置、速度和加速度信息。该设备广泛适用于车辆动力学、驾驶机器人及Euro NCAP等测试场景,为自动驾驶研发提供可靠数据支撑。